A state space model is a partially observed Markov model:
are the latent states are the observations are exogenous inputs
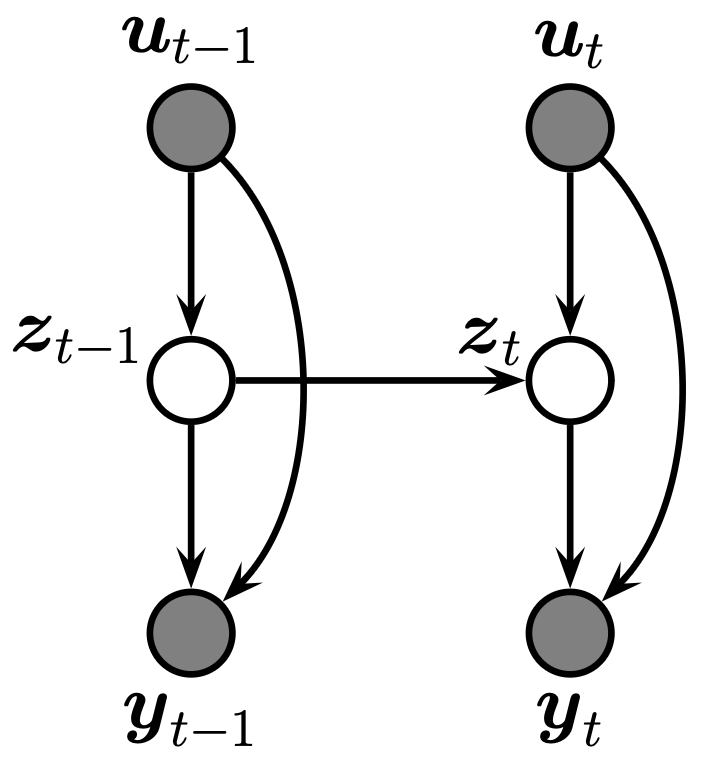
Using the Markov property, the above probabilistic graphical model forms the joint distribution
| Dynamics model | Observation model | Model |
|---|---|---|
| Categorical (discrete states) | Any | [[./hidden markov model |
| Linear Gaussian | Linear Gaussian | [[./linear gaussian ssm |
| Nonlinear, Gaussian noise | Nonlinear, Gaussian noise | [[./nonlinear gaussian ssm |
| Gaussian (linear or nonlinear) | Non-Gaussian | [[./generalised gaussian ssm |
| Continuous-time SDE | Discrete-time observations | [[./continuous-discrete state space model |
See ssm resources.
Inference and parameter estimation
Inference has two parts: an inner loop (state estimation given fixed
State estimation (inner loop)
- Filtering:
— online, forward pass - Smoothing:
— offline, forward-backward
| HMM | LGSSM | Nonlinear Gaussian | Generalised | |
|---|---|---|---|---|
| Discrete filter | Exact | — | — | — |
| Kalman filter | — | Exact | — | — |
| EKF / UKF | — | Overkill | Approximate | Poor* |
| Particle filter (SMC) | Overkill | Overkill | Yes | Yes |
*Local Gaussian approximation of non-Gaussian likelihoods (e.g. CMGF) may be poor for multimodal or heavy-tailed distributions.
Parameter estimation (outer loop)
- MLE / MAP: differentiate
w.r.t. , optimise with gradient ascent (e.g. optax) - MCMC: sample
using the inner loop likelihood. For non-Gaussian models, a particle filter gives a noisy but unbiased likelihood estimate that still targets the correct posterior (Particle MCMC). Use with e.g. blackjax or numpyro - EM: E-step runs filter + smoother for expected sufficient statistics; M-step updates
Model and inference are decoupled — dynamax bundles them together; cuthbert keeps them separate.